Pontos részletek:
Tippek
1. Az INAV, DSHOT nem működhet S3, S5, S7-en a DMA ütközés miatt, kérjük használja az ONESHOT vagy MULTISHOT-ot és kalibrálja az ESC PWM tartományát.
2. BetaFlight, állítsa be a dshot_bitbang = ON-t a X6 és X8 DSHOT használatakor.
3. BetaFlight, A cél neve át lett nevezve MatekF405TE_SD-re
4. ArduPilot, állítsd be a LOG_BACKEND_TYPE = 1 (Fájl) értékét az SD kártyára történő naplózás céljából
Műszaki adatok
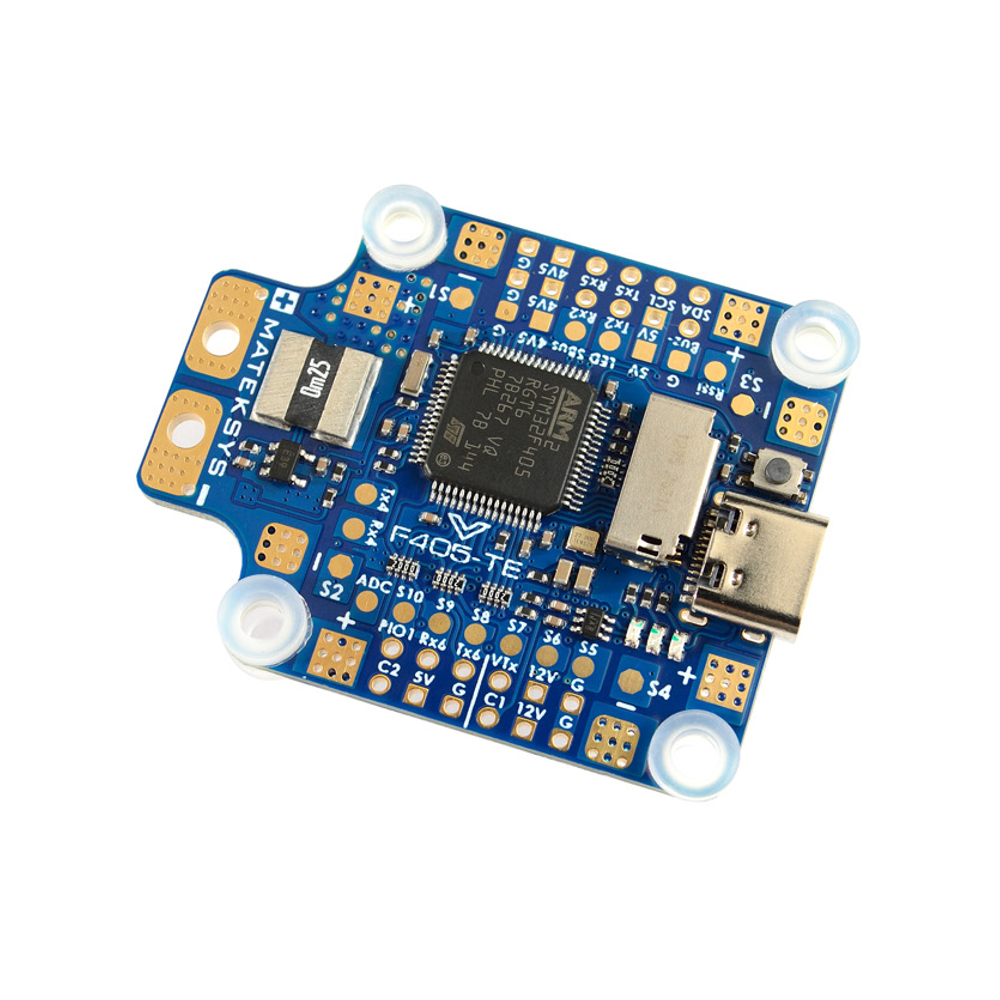
MCU: 168MHz STM32F405RGT6
IMU: ICM42688-P (SPI)
Baro: SPL06-001 (I2C)
OSD: AT7456E (SPI)
Blackbox: MicroSD hely (SPI)
6x UART, 1x Softserial_Tx lehetőség (INAV/BF)
11 PWM kimenet (8 Dshot kompatibilis a BF/ArduPilot számára)
1x I2C
4x ADC (VBAT, Áram, RSSI, Légsebesség)
1x pótalkatrész PINIO
4x különálló ESC tápellátási/jelző csatlakozópont
1x Csoport G/S1/S2/S3/S4 padok a 4in1 ESC jel/GND számára
Beépített inverter az UART2-RX-en a SBUS bemenetére
Átkapcsolható kétszeres kamera bemenet
PDB Specifikációk
9 ~ 36V (3 ~ 8S LiPo)
PDB: 4x 35A (Max.4x 50A)
BEC: 5V 1,5A
BEC: 12V 2A
LDO 3,3 V: 200mA
Jelenlegi érzékelő: 220A, 3.3V ADC (INAV/BF skála 150, ArduPilot 66.7 A/V)
Akkumulátorfeszültség osztó 1K:20K (INAV skála 2100, BF skála 210, ArduPilot BATT_VOLT_MULT 21.0)
Firmware
ArduPilot: MatekF405-TE
INAV: MATEKF405TE_SD
BetaFlight: MATEKF405TE_SD
Fizikai
Szerelés: 30,5 x 30,5mm,Φ4mm gumigyűrűkkel Φ3mm
Méretek: 36 x 46 mm
Súly: 10g
Magában foglalva
1x F405-TE
6x szilikon gumi M4 M3-ra
1x Rubycon ZLH 35V/470uF (alacsony ESR)
Elrendezés és Bekötés

INAV/BF leképezés
ArduPilot Térképezés
Frsky Smartport Telemetria
nem invertált (feltört) S.Port jel
bármilyen tartalék Uart_TX
SERIALx_BAUD 57
SERIALx_LEHETŐSÉGEK 7
SERIALx_PROTOCOL 4 vagy 10 (yaapu-hoz)
DJI FPV OSD (ArduPilot 4.1)
https://ardupilot.org/plane/docs/common-msp-osd-overview.html
OSD_TYPE = 3
SERIAL4_PROTOCOL = 33
MSP_OPTIONS = 0 (szavazási mód)
Relé(PINIO)
PINIO1, PIO1 pad, Alacsony szint alapbeállításként
PINIO2, kamera kapcsoló, alapértelmezés szerint C1 BE
GPIOs
PA4 PINIO1 OUTPUT GPIO(81) LOW //PIO1 pad
PB5 PINIO2 OUTPUT GPIO(82) LOW //kamera kapcsoló
# RCx_OPTION: RC bemeneti opció
28 Relé Be/Ki
34 Relé2 Be/Ki
35 Relé3 Be/Ki
36 Relé4 Be/Ki
például
RELAY_PIN 81 //PIO1 GPIO
RC7_Lehetőség 28 //Relé Be/Ki, A PIO1 alacsony/magas szintjének vezérlése az Adó CH7 segítségével
RELAY_PIN2 82 //Kamera kapcsoló GPIO
RC8_OPTION 34 //Relé2 Be/Ki, A PB5 lábbal történő magas/alacsony szint vezérlése az Emittens CH8 használatával
A konfigurált funkció akkor indul el, amikor a segédkapcsoló pwm-értéke meghaladja a 1800-at. Deaktiválódik, amikor az érték 1200 alá csökken.
Ellenőrizze a pwm-értéket, amit a távolítható jeladó küld, amikor a kapcsoló ki és be van kapcsolva a Mission Planner Kezdeti Beállítások >> Kötelező Hardver >> Rádió Kalibrációs képernyőn. Ha nem haladja meg a 1800-at vagy nem csökken 1200 alá, akkor célszerű a szervó végpontokat állítani a jeladón.
Tippek
- Az F405-TE rendelkezik előre betöltött INAV fw-vel a minőségellenőrzéshez
- állítsd be a BLHeliSuite-ban a BLHeli32 ESC PWM frekvenciát 48KHz-re vagy annál magasabbra
ArduPilot
ArduPilot fw, „Belső hibák 0x4000 l:213 spi_fail” figyelmeztetés, kérjük állítsa be a LOG_BACKEND_TYPE = 1 (Fájl) értéket az SD kártyához történő naplózás céljából.
Töltse le az ArduPilot firmware-t innen ITT.
INAV
Az INAV firmware-el a DSHOT nem működhet a S3, S5, S7-en a DMA összeütközés miatt, kérjük használja az ONESHOT vagy MULTISHOT-ot és kalibrálja az ESC PWM tartományát.
Töltse le az INAV firmware 4.1.x verzióját a Matck webhelyéről. Az INAV5.x vagy újabb verziót közvetlenül az INAV konfigurátorról.
BetaFlight
Ha 5V-os passzív csipogót használsz, írd be az "set beeper_frequency = 2500" parancsot a CLI-ben
A MATEKF405TE_SD célja támogatott volt az BF4.4 óta.
állítsd be a dshot_bitbang = ON értéket az X6-os és X8-as DSHOT használatakor,
Letöltheti a BF 4.3-at közvetlenül a BF konfigurátorból, a BF 4.2.x-et pedig Itt.
A SPL06-001 barometert nem támogatja a Betaflight.