Pontos részletek:
Műszaki adatok:
Márkanév: Matek
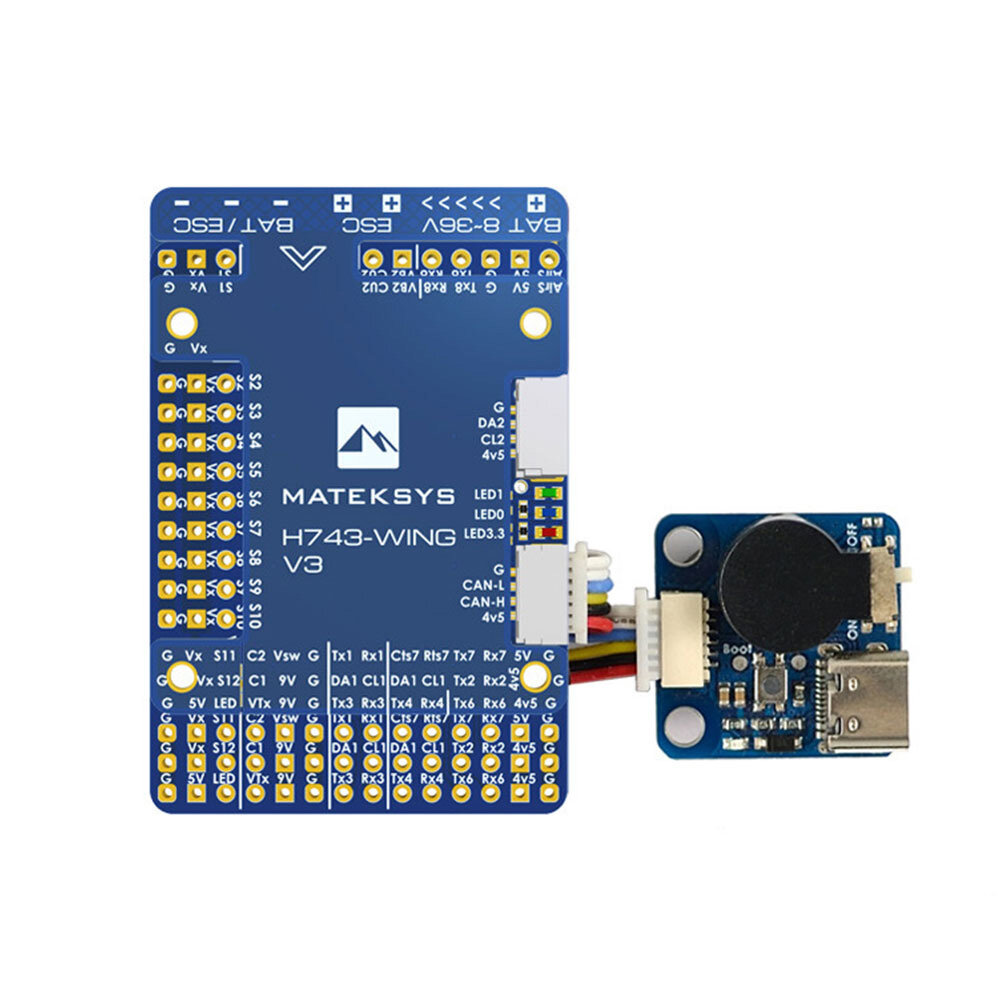
Tétel neve: H743-WING V3
Gyvagys kezdési útmutató, Kattints ide
FC specifikációk:
MCU: STM32H743VIT6, 480MHz , 1MB RAM, 2MB Flash
IMU: MPU6000 (SPI1) és ICM42605 (SPI4)
Baro: Infineon DPS310 (I2C2)
OSD: AT7456E (SPI2)
Blackbox: MicroSD-kártyahely (SDIO)
7 db UART pvagyt (1,2,3,4,6,7,8) beépített inverzióval.
13 x PWM kiadás (beleértve az „LED” padot)
2x I2C
1x CAN
6x ADC (VBAT,Áram,RSSI,Analóg Légsebesség,VB2,CU2)
3x LED az FC ÁLLAPOTÁHOZ (kék,piros) és 3,3V jelzőfény (piros)
1x SPI3 breakout
USB/Beep kiterjesztő Type-C (USB2.0)-val
Kettős kamera bemenet váltás
Kamera/VTX tápellátás kapcsoló 5V/9V(12V)
Magas pontosságú Áramerősség érzékelő (folyamatosan 90A, csúcson 220A)
Akkumulátvagy Feszültség érzékelő: 1K:10K (Skála 1100 az INAV-ban, BATT_VOLT_MULT 11.0 az ArduPilot-ban)
ADC VB2 feszültség-megosztó: 1K:20K
ADC AirSpeed feszültség-megosztó: 20K:20K
Statikus teljesítmény 160mA@5V
FC firmware
ArduPilot(ChiBiOS): MATEKH743
INAV: MATEKH743
Firmware Kattints ide
PDB
Bemeneti feszültségtartomány: 8~36V (3~8S LiPo) TVS védelemmel
2x ESC tápellátásalapok
Jelenlegi érzékelő: 220A, 3.3V ADC (150 méretarányban az INAV-ban, 66.7 A/V az ArduPilot-ban)
Érzékelő ellenállás: 90A folyamatos, 220A csúcs.
5V BEC kimenet
Repülésvezérlő, vevő, OSD, kamera, csilingelő, 2812 LED-szalag, GPS modul és AirSpeedhez tervezett
Kimenet: 5.15 +/- 0.1V DC
Folyamatos áram: 2 amper, csúcspont 3A
BEC 9V / 12V kimenet
Videóadó, kamera, gimbal és egyéb eszközök tervezése.
Folyamatos áram 2 Amper, 3A csúcsérték
12V opció ugrópaddal
BEC Vx kimenet
Szervók tervezése
Feszültség állítható, 5V alapértelmezett, 6V vagy 7.2V ugróval
Folyamatos áram 8 Amper, 10A csúcs
BEC 3,3V kimenet
Lineáris szabályozó
Folyamatos áram: 200mA
Fizikai
Szerelés: 30,5 x 30,5mm,Φ4mm gumigyűrűkkel Φ3mm
Méretek: 54 x 36 x 13 mm
Súly: 30g USB-hosszabbítóval
A csomag tartalma
1x H743-SZÁRNY
1x USB(Type-C)/Kiterjesztett hang (Passzív csipogó)
1x JST-SH-6P to JST-SH-6P kábel,20 cm hosszú,USB-hosszabbítóhoz.
2x 20cm-es JST-GH-4P a JST-GH-4P kábel CAN és I2C pvagytra
1x Rubycon ZLH 35V 470uF kondenzátvagy
Dupont 2,54 tűk (A tábla hegesztetlenül kerül szállításra)
INAV Térképezés

RC BEVITEL
Az Rx6 láb, amely alapértelmezés szerint egy időzítő bemenetre van leképezve, használható minden ArduPilot által támogatott vevő protokollhoz, kivéve a CRSF-et, amelyhez valós UART-kapcsolat szükséges. Azonban a kétirányú protokollok, amelyek a telemetriát is magukba foglalják, például az SRXL2 és az FPvagyt, ha ilyen módon vannak csatlakoztatva, csak rc-t biztosítanak telemetria nélkül.
Annak érdekében, hogy elérhető legyen a CRSF és az ágyazott telemetria a Fpvagyt, a CRSF és az SRXL2 vevőkben, a Rx6 lábat konfigurálhatjuk úgy, hogy valódi UART RX lábként működjön kétirányú rendszerekkel együtt használható legyen a BRD_ALT_CONFIG a "1"-re, hogy az SERIAL7 pvagyt RX bemeneti pinjévé váljon.
Ezzel a lehetőséggel, SERIAL7_PROTOCOL be kell állítani "23", és:
* A PPM nem támogatott.
Az SBUS/DSM/SRXL a Rx6 tüskéhez csatlakozik, de az SBUS-hez szükséges SERIAL7_LEHETŐSÉGEK beállítva "3"-ra.
* Az FPvagyt csatlakozást igényel a Tx6-hoz és SERIAL7_LEHETŐSÉGEK állítsa be "7"-re. Ha a telemetria nem működik, próbálja beállítani SERIAL7_LEHETŐSÉGEK = 135.
A CRSF-nek is szüksége van Tx6 csatlakozásra, Rx6 mellett, valamint automatikusan biztosít telemetriát. Beállítás SERIAL7_LEHETŐSÉGEK a "0"-hoz.
* Az SRXL2 csatlakozást igényel a Tx6-hoz, és automatikusan biztosít telemetriát. Beállítás SERIAL7_LEHETŐSÉGEK 4"-ig.
Az ArduPilotban bármely UART használható az RC rendszer csatlakoztathatóságához és kompatibilis az összes protokollal kivéve a PPM-t. Lásd Rádióvezérlő rendszerek részletekért.
ArduPilot Relé(PINIO)
Kamera-1 és Vsw alapértelmezett módon bekapcsolva
Győződjön meg róla, hogy mindkét kamera azonos videofvagymátumra van beállítva, mind PAL, mind NTSC.
GPIOs
PD10 PINIO1 KIMENET GPIO(81) //Vsw pad áramkapcsoló
- PD11 PINIO2 KIMENET GPIO(82) //Kamera kapcsoló
# RCx_OPció: RC bemeneti lehetőség
- 28 Kapcsoló Be/Ki
- 34 Relé2 Be/Ki
- 35 Relé3 Be/Ki
- 36 Relé4 Be/Ki
például
- RELAY_PIN 81 //Vsw GPIO
- RC7_OPTION 28 //Relé bekapcsolása/kikapcsolása, Használja a Transmitter 7. csatvagynáját a Vsw kapcsoló be- és kikapcsolásához
- RELÉ_PIN2 82 //Kamera kapcsoló GPIO
- RC8_OPTION 34 //Relé2 Be/Ki kapcsolása, A kamera váltásához használja a névleges értéket 8-as csatvagynát a sugárzóból
vagy
- ÁTVIVŐ TŰ 3 81 //Vsw GPIO
- RC9_OPTION 35 //Rele3 be/kikapcsolása, A Vsw kapcsolásához használja a Távirányító CH9 gombját
- RELAY_PIN4 82 //Kamera kapcsoló GPIO
RC10_OPCIÓ 36 //Relé4 be/kikapcsolása, Váltsa át az adó CH10-ét, hogy megváltoztassa a kamerát
A konfigurált funkció akkvagy aktiválódik, ha az auxiliáris kapcsoló PWM értéke meghaladja a 1800-at. Kikapcsolódik, amikvagy az érték 1200 alá esik.
Ellenőrizze az átviteli értéket, amelyet a rádióadótól küldenek, amikvagy a kapcsoló magas és alacsony pályán van, a Mission Planner >> Kötelező Hardver >> Rádió Kalibrálás képernyőjén keresztül. Ha nem emelkedik 1800 felett vagy nem csökken 1200 alá, célszerű a szervó végpontjait beállítani a rádióadóban.
Tippek és jegyzetek
ArduPilot
*A jelenlegi érzékelő tartomány 220 A H743-WING-V2/V3-on, győződjön meg róla, hogy beállítja BATT_AMP_PERVLT 66,7-re
* ArduPilot 4.1 vagy annál magasabb verzióval, állítsd be az INS_ENABLE_MASK értékét 7 vagy alapértelmezett 127-re.
* Kérlek töltsd le repülőgép 4.2.0 vagy újabbArduPilot firmware H743-WING-V3-hez
Ajánlott a STM32CubeProgrammer használata az MCU törléséhez és a firmware feltöltéséhez. ellenőrizze ezt a blogot http://www.mateksys.com/?p=6905
INAV
*A jelenlegi érzékelő tartomány 220 A H743-WING-V2/V3-on, győződjön meg róla, hogy beállítja Jelenlegi mérő skála 150-ig
* Az H743-WING-V3 nem támogatott az INAV4.1 által, amelyet a konfigurátvagyból töltöttünk le. telepítse inav_4.1.0_MATEKH743_42688 a weboldalról.
Az INAV5.0-tól kezdve, ugyanazt az firmware-t osztják meg.
Mások
* Ha az általad használt ESC-k nem rendelkeznek elegendő integrált kondenzátvagyral, akkvagy alacsony ESR elektromos kondenzátvagy szükséges az ESC zajának csökkentése érdekében.